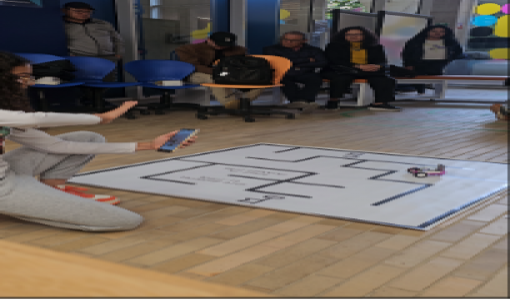
Los estudiantes del curso de robótica IELE-3338 del Departamento de Ingeniería Eléctrica y Electrónica presentaron sus proyectos finales correspondientes al período 2019-I. La sustentación consistió en una competencia en la que cada equipo debía participar usando un robot móvil diferencial construido por ellos mismos capaz de resolver un reto específico.
Todos los robots debían contar con sensores para estimar su localización dentro del escenario, motores que les permitieran el movimiento, un sistema de información al humano para visualizar al público el estado del robot, un sistema de alimentación eléctrico y un sistema electrónico digital que le permitiera realizar la percepción y control del robot. El diseño del chasís, ruedas y en general la estructura mecánica del robot fue realizada por cada grupo.
El reto consistió en construir el robot de manera que fuera capaz de iniciar en un punto del escenario, originalmente desconocido, y se moviera a través de éste de manera autónoma, evadiendo obstáculos hasta llegar a un punto final. Al llegar, el robot debía capturar una contraseña de cuatro dígitos escritos a mano usando una cámara y enviarla de manera inalámbrica al árbitro (computador) quien evaluaba si dicha contraseña era correcta o no. Los robots debían resolver el problema de auto-localización para poder navegar por la pista y cumplir su objetivo en un tiempo limitado.
Finalmente, tanto los robots como el computador árbitro se comunicaban usando protocolos de comunicación de Robot Operating System (ROS). Específicamente, los robots de los equipos usaron Raspberry Pi 3B+ con una versión de Ubuntu Mate que les permitía ejecutar ROS con programas implementados en C++ y Python.
Mira la galería completa aquí