Control y diseño óptimo de prótesis robóticas
 Descripción
DescripciónUno de los retos más grandes en robótica es el diseño de sistemas que trabajan en conjunto con humanos. En el caso de robots que se ajustan al cuerpo, exoesqueletos y prótesis robóticas crean un reto particular porque el humano hace parte del lazo de control, por lo cual, diseños deficientes de los mecanismos o algoritmos de control tienen un impacto directo en la salud de los usuarios.
En este curso discutiremos, de forma introductoria, el diseño óptimo de mecanismos y el control de estos robots que se ajustan al cuerpo y las experiencias con la prótesis robótica “Open Source Leg”. El objetivo de estas técnicas de diseño óptimo es minimizar el consumo energético de la pierna, lo cual implica una reducción de peso o mayor vida operacional de las baterías.
El objetivo de las técnicas de control es proveer un lazo de comunicación mecánico para que la pierna robótica pueda entender las intenciones del usuario. Reducir el peso de robots que se ajustan al cuerpo, aumentar la vida operacional de las baterías, o lograr que la pierna robótica entienda la intención del humano impacta positivamente la salud de los usuarios.
Algunas de las preguntas centrales en este curso son: ¿Cómo diseñar elementos elásticos para minimizar el consumo energético de estos robots que se ajustan al cuerpo? ¿Cuál es el papel de la optimización en estos diseños? ¿Cómo comunicar mecánicamente entre el usuario y una pierna robótica? También tendremos como invitados a otros expertos reconocidos a nivel mundial en el tema, y discutiremos las oportunidades de implementación de estas tecnologías en Colombia.
Reviva el Webinar "Diseño y control de prótesis robóticas" para conocer más sobre los temas del curso.
 Profesor invitado
Profesor invitadoEdgar A. Bolívar es ingeniero mecatrónico de la Universidad Nacional de Colombia, con maestría y doctorado en la Universidad de Texas en Dallas, Estados Unidos.
Actualmente es investigador del Locomotor Control Systems Laboratory de la Universidad de Michigan, laboratorio líder a nivel mundial en el desarrollo de prótesis robóticas.
Su investigación está enfocada en el diseño óptimo y control de exoesqueletos y prótesis robóticas de piernas con fines de rehabilitación.
Para conocer más información del profesor y del curso visite el siguiente enlace
Horario y contenidosLas clases se dictarán de manera virtual y sincrónica de martes a sábado en el horario de 8:00 a.m. a 12 p.m desde el 16 de junio hasta el 27 de junio de 2020.
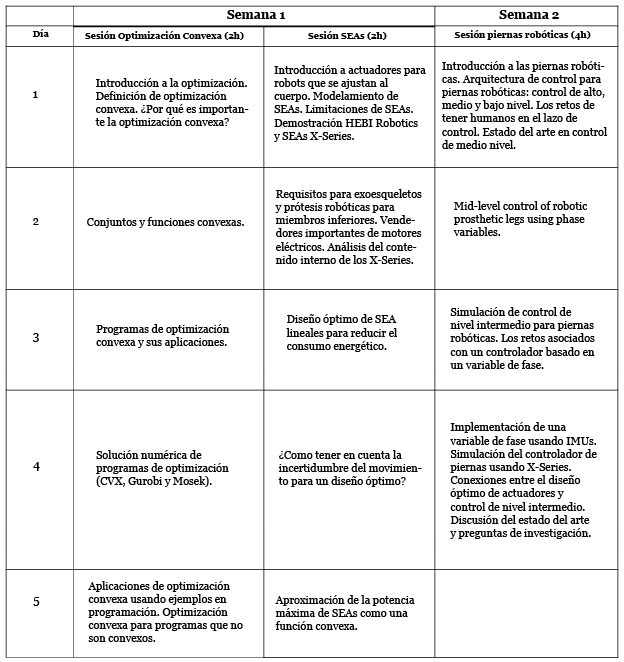
A continuación, conozca el programa completo del curso:
 Requisitos académicos y técnicos
Requisitos académicos y técnicosComo requisitos académicos, para este curso se necesitan conocimientos de matemáticas básicas de ingeniería y de programación en Matlab.
Como requisito técnico se necesita tener una licencia de Matlab.
Importante: Si eres estudiante uniandino, gracias al convenio que tiene la Universidad con MathWorks puedes acceder a una licencia de forma gratuita hasta el 30 de junio de 2020. Conoce todos los detalles aquí